

Hi��~����
�gӭ��������ʿ�C(j��)���˾W(w��ng)












 �����C(j��)������� ݔ���X݆��T�S�� HW0315061-1
�����C(j��)������� ݔ���X݆��T�S�� HW0315061-1 �����C(j��)�������SRDA-SDA35A01A-E�Ŵ���ģ�KA
�����C(j��)�������SRDA-SDA35A01A-E�Ŵ���ģ�KA  ABB�C(j��)������� Robot IRB2400/4403HEA802409
ABB�C(j��)������� Robot IRB2400/4403HEA802409  ȫ��ABB�C(j��)�������CC-LinkͨӍ�忨3HNE00421
ȫ��ABB�C(j��)�������CC-LinkͨӍ�忨3HNE00421  ABB�C(j��)������� EIB DSQC 401 3HAC044168-001
ABB�C(j��)������� EIB DSQC 401 3HAC044168-001 ABB�C(j��)������� 3HNA014611-001 2ɫ�Qɫ�yģ�K
ABB�C(j��)������� 3HNA014611-001 2ɫ�Qɫ�yģ�K ABB�C(j��)��������C(j��)����I/O��Ԫ 3HAC025917-001
ABB�C(j��)��������C(j��)����I/O��Ԫ 3HAC025917-001 �����C(j��)��������������S���ƻ���SRDA-EAXA21A
�����C(j��)��������������S���ƻ���SRDA-EAXA21A �����C(j��)��������Ƅ�(d��ng)������JANCD-YBK21-3E
�����C(j��)��������Ƅ�(d��ng)������JANCD-YBK21-3E KUKA C4���C(j��)PC-KRC4 KUKA�쿨�C(j��)����
KUKA C4���C(j��)PC-KRC4 KUKA�쿨�C(j��)����܉1.png)
 ����ʿGBS-01-W1500��(�X����)���I(y��)�C(j��)���ˌ�(d��o)܉���I(y��)�C(j��)���ˌ�(d��o)܉|�C(j��)���˵�܉|�C(j��)���˵����S|C2 ���I(y��)�C(j��)���ˌ�(d��o)܉|�C(j��)���˵�܉|�C(j��)���˵����S|C8 ���I(y��)�C(j��)���ˌ�(d��o)܉|�C(j��)���˵�܉|�C(j��)���˵����S|C5
����ʿGBS-01-W1500��(�X����)���I(y��)�C(j��)���ˌ�(d��o)܉���I(y��)�C(j��)���ˌ�(d��o)܉|�C(j��)���˵�܉|�C(j��)���˵����S|C2 ���I(y��)�C(j��)���ˌ�(d��o)܉|�C(j��)���˵�܉|�C(j��)���˵����S|C8 ���I(y��)�C(j��)���ˌ�(d��o)܉|�C(j��)���˵�܉|�C(j��)���˵����S|C5 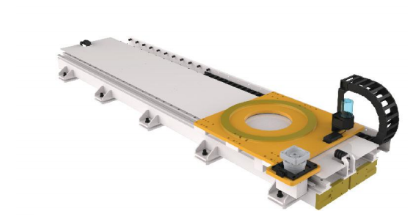 �C(j��)���˵�܉���g(sh��)�đ�(y��ng)����Щ�I(l��ng)��
�C(j��)���˵�܉���g(sh��)�đ�(y��ng)����Щ�I(l��ng)�� ABB�C(j��)���˹ܾ��� IRB6700
ABB�C(j��)���˹ܾ��� IRB6700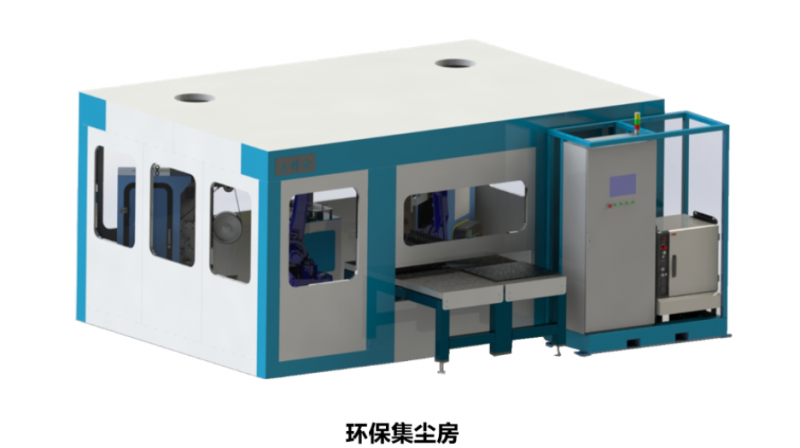 ����ʿ���С����ĥ��վ ���x�O(sh��)��
����ʿ���С����ĥ��վ ���x�O(sh��)��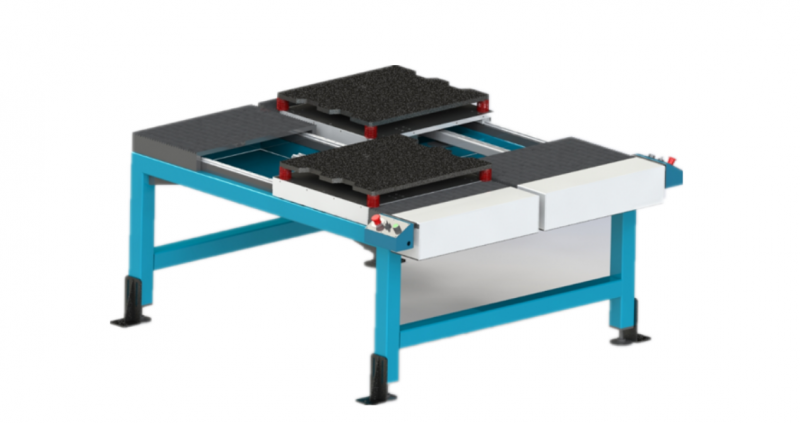 ����ʿ���С����ĥ��վ ���Ϸ�ʽ
����ʿ���С����ĥ��վ ���Ϸ�ʽ ����ʿ�C(j��)���˾��|
����ʿ�C(j��)���˾��| ABB���I(y��)�C(j��)���ˌ��I(y��)��Ӗ(x��n),ᘌ�(du��)���g(sh��)��Ӗ(x��n),�gӭ�V
ABB���I(y��)�C(j��)���ˌ��I(y��)��Ӗ(x��n),ᘌ�(du��)���g(sh��)��Ӗ(x��n),�gӭ�V 






































 �ھ��ͷ�
�ھ��ͷ� �ſͷ�
�ſͷ�