 �ھ��ͷ�
�ھ��ͷ� �ſͷ�
�ſͷ�














��ԃ�Ԓ
021-80392549

��������r�£���(y��u)���C(j��)������Ҫ������²��E�����ӡ���ʼ���C(j��)���ˣ����_�����ӣ������d�����ӳ����س�ʼ�c(di��n)���Ԅӣ��͆��ӳ���
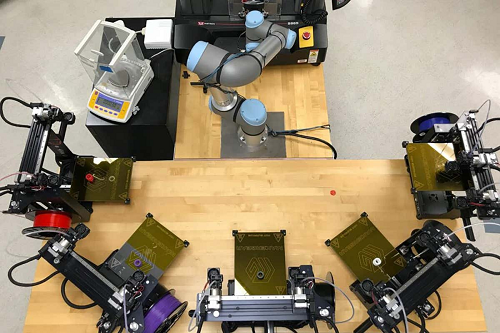
UR�C(j��)���˵ij�Ҏ(gu��)������ʹ�ý̌W(xu��)�x���ϵ�·���c(di��n)�͈A���\(y��n)�Ӂ����̙C(j��)���˵��\(y��n)�ӡ�ԓ�����dz��m���ڳ�Ҋ�ąf(xi��)���C(j��)���ˑ�(y��ng)�ã���C(j��)���������Ѷ��һ����x�ͷ��á�Ȼ��������C(j��)������Ҫ��ѭ��(f��)�s��܉�E����Ч���������롣���磬ͨ�^����܇�l(f��)�әC(j��)���w픲�ͿĨҺ�w�|���̙C(j��)���˾��_��ۙ�l(f��)�әC(j��)݆����������е�·�c(di��n)��������Ҫ�ׂ�(g��)С�r(sh��)����һ��ĕr(sh��)�g����(y��u)���C(j��)�����܉��Ԅ��\(y��n)�г�����Ό�(sh��)�F(xi��n)��
�����Ԅ�����������E������Ҫ�ڡ����b�O(sh��)�á����ڵġ�Ĭ�J(r��n)�����x�(xi��ng)�����O(sh��)���ԄӼ��d�������Ԅӳ�ʼ�����Ԅӳ����O(sh��)���ԄӼ��dDI��̖�����⣬ӛ���ڱ���r(sh��)�ڈ����`�s���b���ļ��С����ȣ�����(j��)CAD/CAMܛ���еĹ���CADģ�Ͷ��xG���a����·������Σ�G���a����·���ļ�ͨ�^USB�W���(q��)������(d��o)��Polyscope��������ͨ�^��������ƽ�棨��������(bi��o)ϵ����������·���ą�������(bi��o)ϵ�����V�C(j��)���˵���·���������C(j��)���˜�(zh��n)��È�(zh��)�е���·�������ɵ���·�����Ñ���Polyscope�о���ֻ��Ҫһ��ĕr(sh��)�g���C(j��)���˾��̕r(sh��)�g���s�̣�
��(y��u)���C(j��)�����܉��Ԅ��\(y��n)�г�����Ό�(sh��)�F(xi��n)�����˱��ⷵ�س�ʼ�c(di��n)�IJ�������ʼ�c(di��n)��·����Ϳ����O(sh��)�Þ�����·���c(di��n)���׃·���c(di��n)�����C(j��)���˷��خ�(d��ng)ǰλ�õij�ʼ�c(di��n)���\(y��n)���^�̱���ǰ�ȫ�ġ�G���a��CNC���������x��(sh��)�ؙC(j��)���е�늙C(j��)����Ƅӡ��Ƅ��ٶȺ�·�����C(j��)�����c�C(j��)���˻������ơ���(sh��)�ؙC(j��)������?y��n)�ÿ��(g��)�P(gu��n)��(ji��)����늙C(j��)�(q��)�ӡ��҂�ֻ��Ҫ����G���a�����əC(j��)�������UR�_�l(f��)�F(tu��n)�(du��)�ѽ�(j��ng)�˷����@��(g��)���g(sh��)�y�}���҂��x��G�a����?y��n)��҂��x����G�a��CAD/CAMܛ���V��֧��G���a��������ѽ�(j��ng)��ʹ������CAD/CAMܛ�������o��ُ�I��?q��)W��(x��)����ܛ����������ʽ����DXF�����Զ��x·���ĎΈD�Σ������ܰ������б�Ҫ�ęC(j��)���˾�����Ϣ���絶�߷����ٶȺͼ��ٶȡ�
|

|

|

|
�j(lu��)��ȫ�O(ji��n)��")

����")
�j(lu��)110��(b��o)������(w��)")
